



















Headless Cat Robots, Built For Exploration, Could Rescue Coal Miners In Future [Video]
French scientists have designed a headless "cheetah-cub robot" that can swiftly navigate uneven terrain by mimicking the walking motions of cats. Their discovery was published today in International Journal of Robotics Research and may one day be used during terrestial and underground exploration missions.
Developed in the Biorobotics Laboratory (Biorob) at Ecole Polytechnique Fédérale de Lausanne, Switzerland, the cheetah-cub robot is a marquee development in the world of biomechanics. This technology could be adapted in the future to improve the locomotion of humanoid robots.
"Studying and using the principles of the animal kingdom to develop new solutions for use in robots is the essence of our research," said Biorob director Dr. Auke Ijspeert, an expert in artificial intelligence.
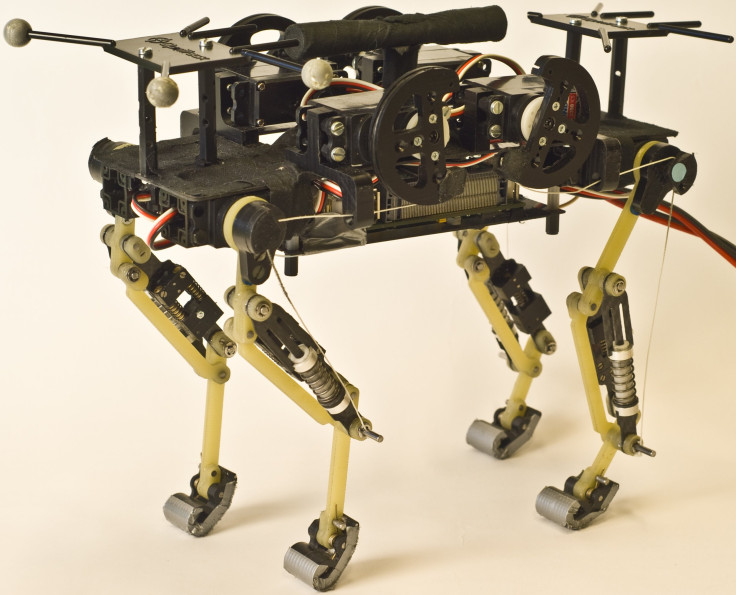
The legs of cheetah-cub robot are divided into three sections like the limbs of a house cat. The robot leg segments were scaled to match the dimensions of feline limbs and were connected with springs that mimic the tensile strength of tendons. Actuators, small motors that transfer energy into movement, serve as the muscles.
"This morphology gives the robot the mechanical properties from which cats benefit, that's to say a marked running ability and elasticity in the right spots, to ensure stability," said Alexander Sprowitz, a Biorob scientist. "The robot is thus naturally more autonomous."
The robot is under a foot long, and it weighs less than 2 pounds. It is the fastest four-legged robot under 60 pounds that has ever been engineered.
Like the name suggests, the cheetah-cub robot is quick and agile. It has three speeds: walk, trot, and gallop. This early model was designed for fast locomotion and can traverse some simple obstacles, like steps.
While this research is still in its early days, the engineers believe the cheetah-cub robot could one day be perfected for rough terrain. In the future, emergency crews may use the cheetah-cub robot to rescue coal miners trapped underground or after natural disasters.
Programming the coordinated walking motion of a four-legged robot can be cumbersome, and the research team relied on a "central pattern generator" (CPG) network to get it done. A CPG is an artificial brain network that can consistently reproduce a complex pattern or sequence of movements. According to the tech blog 'crave', another group of scientists from the Italian Institute of Technology chipped in and helped perfect the CPG used with the cheetah-cub robot.
Source: Spröwitz A, Tuleu A, Vespignani M, Ajallooeian M, Badri E, Ijspeert AJ. Towards Dynamic Trot Gait Locomotion-Design, Control, and Experiments with Cheetah-cub, a Compliant Quadruped Robot. International Journal of Robotics Research. 2013.







